Quadruped Robot Hardware and Swarm Intelligence: From Single-Agent Motion Control to Multi-Agent Coordination
Our team at Evolution Tech Co., Ltd. is developing an open-source, cost-effective quadruped robot platform aimed at bridging single-agent motion control and multi-agent swarm coordination. The project covers mechanical design, embedded software, and algorithms for dynamic locomotion and cooperative behaviors.
Project Video
Below is a short demonstration of our quadruped platform capabilities, including dynamic gaits and coordinated maneuvers.
What We Have Achieved
Motion control
We provide high-dynamic motion control algorithms that support agile behaviors such as backflips, jumping, and inverted poses. The stack is designed for real-time execution on onboard compute and is extensible for custom tricks and terrain adaptation.
Hardware–software integration
Our platform is built as an integrated system: mechanical structure, electronics, and embedded software are co-designed. This includes actuator selection and placement, power distribution, and low-level firmware for joint control and state estimation.
Vision and perception
We integrate vision-based perception for navigation and interaction: visual SLAM for localization and mapping, object following, and terrain recognition. The pipeline leverages deep learning where appropriate and runs on the robot’s onboard computer.
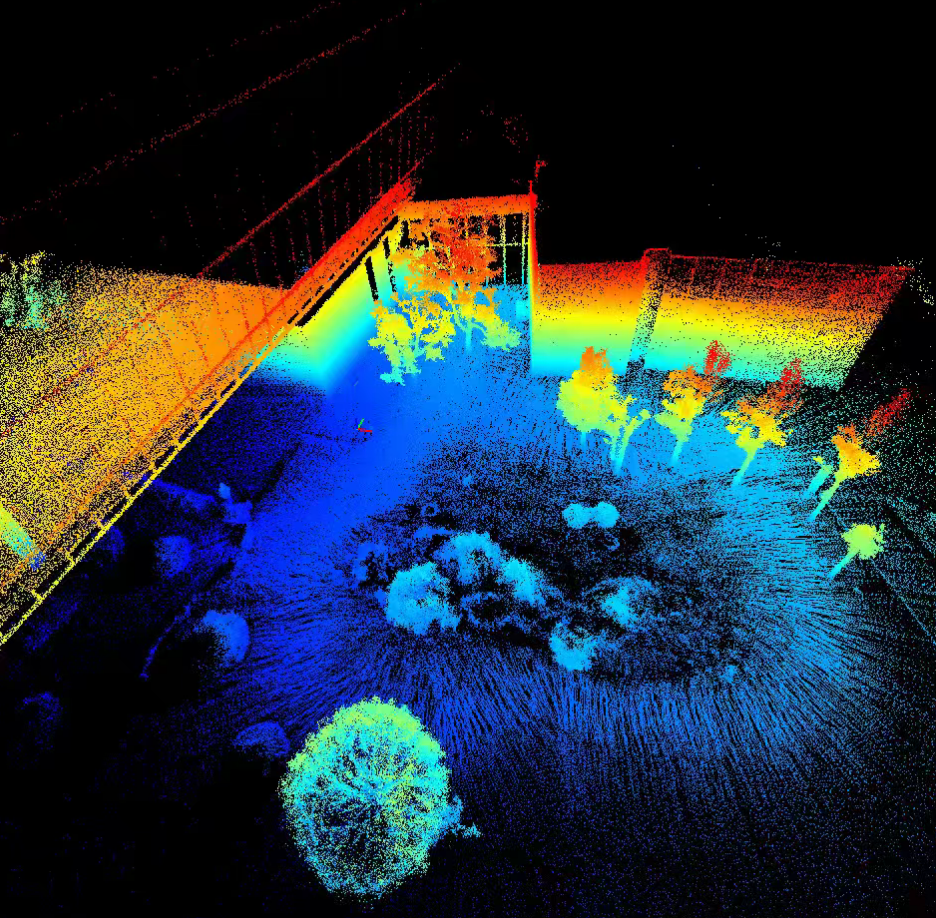
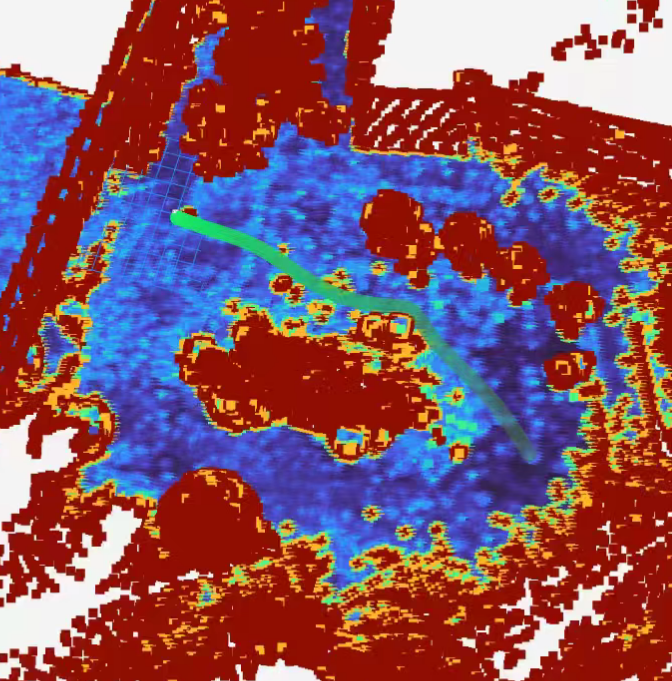
Left: example mapping and localization. Right: another scene with reconstructed structure.
Platform Specifications
We offer two main platforms: the compact Q1 quadruped and the larger Y1 wheel-legged robot. Key parameters are summarized below.
| Parameter / Model | Q1 Quadruped | Y1 Wheel-Legged |
|---|---|---|
| Weight (with battery) | ~10 kg | ~40 kg |
| Standing size (L×W×H) | 58 × 30 × 35 cm | 85 × 62 × 55 cm |
| Folded / prone size (L×W×H) | 65 × 30 × 15 cm | 92 × 62 × 30 cm |
| Max speed | 3 m/s | 3 m/s |
| Runtime | ~1–2 h | ~4–8 h |
| Payload | 3 kg | 25 kg |
| Max step height | 24 cm | 40 cm |
| Stair height (continuous) | 16 cm | 25 cm |
| Max slope | 30° | 30° |
| Degrees of freedom (DOF) | 12 | 16 |
| Onboard compute | 8-core CPU | 8-core CPU |
| Peak torque | 17 N·m | ~120 N·m |
Q1 Quadruped
The Q1 is our compact quadruped for research and development: lightweight, modular, and suitable for indoor and outdoor experiments and swarm setups.


Y1 Wheel-Legged Robot
The Y1 platform combines legs and wheels for robust mobility on mixed terrain and longer missions, with higher payload and runtime.
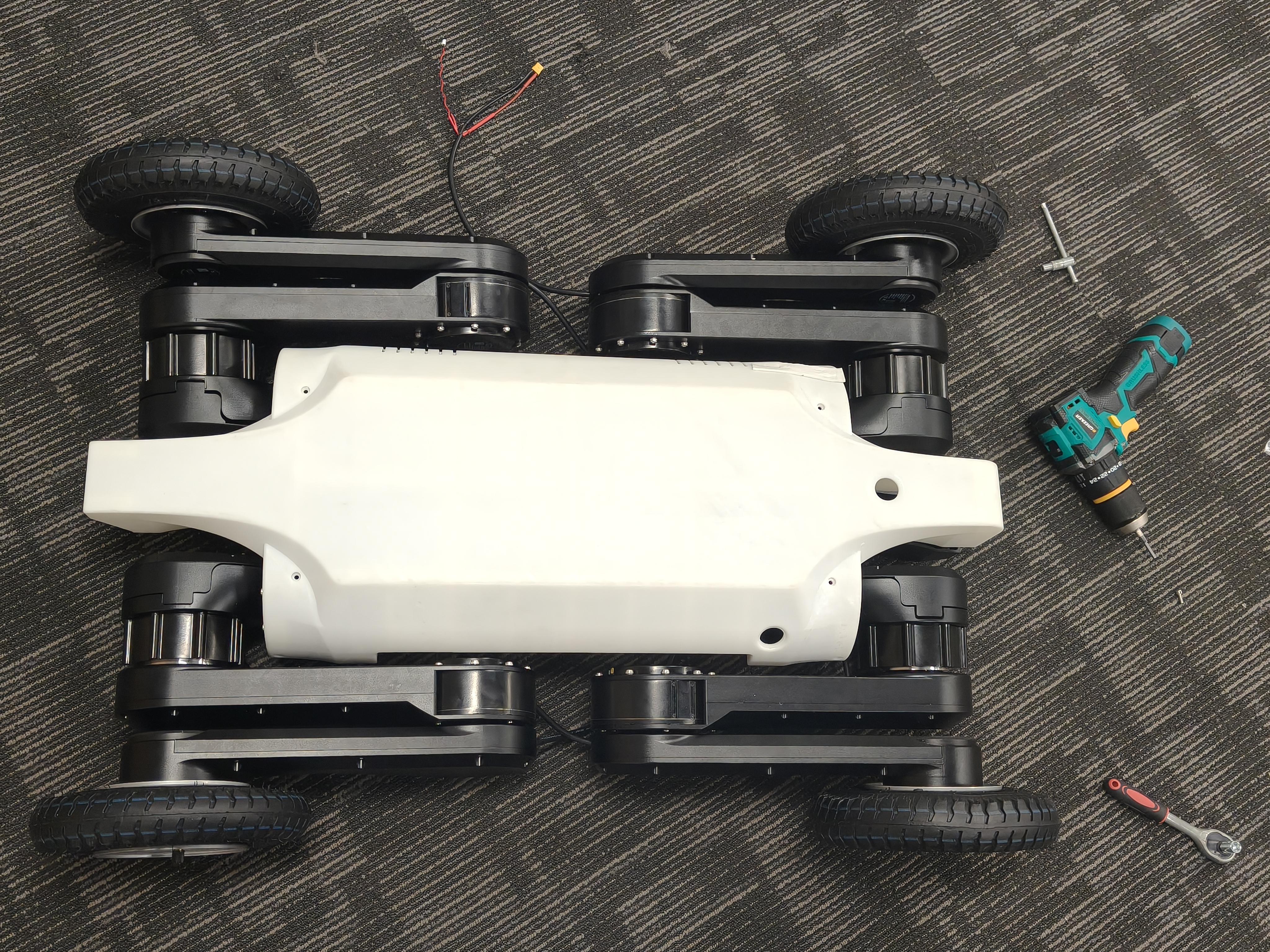

Demo video: typical locomotion and payload handling.